%matplotlib inline
import numpy as np
from devito import Operator,Eq,solve,Grid,SparseFunction,norm
from devito import TimeFunction,Function
from devito import gaussian_smooth
from devito import mmax
from devito.logger import info
from examples.seismic import Model
from examples.seismic import plot_velocity,plot_shotrecord
from examples.seismic import Receiver
from examples.seismic import PointSource
from examples.seismic import plot_image,AcquisitionGeometry
from examples.seismic import TimeAxis
from examples.seismic.self_adjoint import (setup_w_over_q)
from examples.seismic.acoustic import AcousticWaveSolver
import matplotlib.pyplot as plt
from mpl_toolkits.axes_grid1 import ImageGrid
from mpl_toolkits.axes_grid1.axes_divider import make_axes_locatable
import matplotlib.ticker as plticker
from devito import configuration
configuration['log-level'] = 'WARNING'13 - Implementation of a Devito acoustic Least-square Reverse time migration
This tutorial is contributed by SENAI CIMATEC (2021)
This tutorial is based on:
LEAST-SQUARES REVERSE TIME MIGRATION (LSRTM) IN THE SHOT DOMAIN (2016)
Antonio Edson Lima de Oliveira, Reynam da Cruz Pestana and Adriano Wagner Gomes dos Santos
Brazilian Journal of Geopyisics
http://dx.doi.org/10.22564/rbgf.v34i3.831
Plane-wave least-squares reverse-time migration (2013)
Wei Dai and Gerard T. Schuster
GEOPHYSICS Technical Papers
http://dx.doi.org/10.22564/rbgf.v34i3.831
Two-point step size gradient method (1988)
Barzilai, J. and Borwein, J.
IMA Journal of Numerical Analysis
https://doi.org/10.1093/imanum/8.1.141
Introduction
The goal of this tutorial is to implement and validate the Least-squares reverse time migration (LSRTM) using a 2D three-layered velocity model with a square in the middle. The algorithm has been implemented using the Born’s appoximation.
The acoustic wave equation for constant density is:
\[\begin{equation} m_{0} \dfrac{\partial^2 p_0 }{\partial t^2} - \nabla^2 p_0 = s (\mathbf{x},t) \hspace{0.5cm} (1) \end{equation}\]
where $s (,t) $ is the source, \(p_{0}\) is the background wavefield and \(m_{0}\) is the smoothed squared slowness.
A perturbation in the squared slowness \(m = m_{0} + \delta m\) produces a background wavefield ( \(p_{0}\) ) and scattered wavefield ( \(\delta p\) ), so the wavefield \(p\) is approximated to $ p = p_0 + p$, that obeys the relation:
\[\begin{equation} m \dfrac{\partial^2 p}{\partial t^2} - \nabla^2 p = s (\mathbf{x},t) \hspace{0.5cm} (2) \end{equation}\]
Using the approximation of \(p\) and \(m\) into equation (2),
\[\begin{equation} (m_{0} + \delta m) \dfrac{\partial^2 (p_0 + \delta p)}{\partial t^2} - \nabla^2 (p_0 + \delta p) = s (\mathbf{x},t) \hspace{0.5cm} (3) \end{equation}\]
Expanding equation (3) we have: \[\begin{equation} m_{0} \dfrac{\partial^2 p_0 }{\partial t^2} - \nabla^2 p_0 + m_{0} \dfrac{\partial^2 \delta p }{\partial t^2} - \nabla^2\delta p + \delta m \dfrac{\partial^2 (p_{0} +\delta p) }{\partial t^2}= s (\mathbf{x},t) \hspace{0.5cm} (4) \end{equation}\]
Reordering the equation (4), \[\begin{equation} m_{0} \dfrac{\partial^2 p_0 }{\partial t^2} - \nabla^2 p_0 + m_{0} \dfrac{\partial^2 \delta p }{\partial t^2} - \nabla^2\delta p = s (\mathbf{x},t) - \delta m \dfrac{\partial^2 (p_{0} +\delta p) }{\partial t^2} \hspace{0.5cm} (5) \end{equation}\]
Considering that $ m = m m $( Via Born’s approximation \(p\approx p_{0}\) ):
\[\begin{equation} m_{0} \dfrac{\partial^2 p_0 }{\partial t^2} - \nabla^2 p_0 + m_{0} \dfrac{\partial^2 \delta p }{\partial t^2} - \nabla^2\delta p = s (\mathbf{x},t) -\delta m \dfrac{\partial^2 p_{0} }{\partial t^2}\hspace{0.5cm} (6) \end{equation}\]
Now we get an equations system:
\[\begin{equation} \left\{ \begin{array}{lcl} m_{0} \dfrac{\partial^2 p_0 }{\partial t^2} - \nabla^2 p_0 = s (\mathbf{x},t),\hspace{0.5cm} (7a) \\ m_{0} \dfrac{\partial^2 \delta p }{\partial t^2} - \nabla^2\delta p = - \delta m \dfrac{\partial^2 p_{0} }{\partial t^2} \hspace{0.5cm} (7b) \\ \end{array} \right. \end{equation}\]
Equations (7a) and (7b) are for Born modelling. The adjoint modelling is defined by the equation:
\[\begin{equation} m_{0} \dfrac{\partial^2 v}{\partial t^2} - \nabla^2 v =\textbf{d} \hspace{0.5cm} (8) \end{equation}\] where \(\textbf{d}\) is the shot recorded.
With all these equations, the migrated image can be constructed
\[\begin{equation} \mathbf{m}_{mig}= \sum_{t} \dfrac{\partial^2 p_0}{\partial t^2}v \hspace{0.5cm} (9) \end{equation}\]
In this notebook the migration and gradient has been precoditioned by the source illumination, so equation (9) becomes:
\[\begin{equation} \mathbf{m}_{mig}= \frac{\sum_{t} \dfrac{\partial^2 p_0}{\partial t^2}v}{\sum_{t} p_{0}^2} \hspace{0.5cm} (10) \end{equation}\]
LSRTM aims to solve the reflectivity model \(\mathbf{m}\) by minimizing the difference between the forward modeled data \(L\mathbf{m}\) and the recorded data \(d\) in a least-squares sense:
\[\begin{equation} f(\mathbf{m}) = \frac{1}{2}||L\mathbf{m}-\mathbf{d}||^{2} \hspace{0.5cm} (11) \end{equation}\]
To solve equation (11), it has been implemented here the steepest descent method with an appropriate step-length,
\[\begin{equation} \textbf{m}_{k+1} = \textbf{m}_k -\alpha_k \textbf{g}_k \hspace{0.5cm} (12) \end{equation}\] where \(\textbf{g}_k\) is the gradient and \(\alpha_k\) is the step-length. The gradient computation is simply taking equation (9) and instead of injecting the shot recorded \(\textbf{d}\), injects the residue \(\textbf{d}_{calc}-\textbf{d}_{obs}\)
For now we are going to import the utilities.
Seismic modelling with Devito
Now let’s import all the parameters needed and create the true 2D velocity model and the smoothed model to perform the Born’s modelling.
shape = (101, 101) # Number of grid point (nx, nz)
spacing = (10., 10.) # Grid spacing in m. The domain size is now 1km by 1km
origin = (0., 0.) # What is the location of the top left corner. This is necessary to define
fpeak = 0.025# Source peak frequency is 25Hz (0.025 kHz)
t0w = 1.0 / fpeak
omega = 2.0 * np.pi * fpeak
qmin = 0.1
qmax = 100000
npad=50
dtype = np.float32
nshots = 21
nreceivers = 101
t0 = 0.
tn = 1000. # Simulation last 1 second (1000 ms)
filter_sigma = (5, 5) # Filter's length
v = np.empty(shape, dtype=dtype)
# Define a velocity profile. The velocity is in km/s
vp_top = 1.5
v[:] = vp_top # Top velocity
v[:, 30:65]= vp_top +0.5
v[:, 65:101]= vp_top +1.5
v[40:60, 35:55]= vp_top+1
init_damp = lambda func, nbl: setup_w_over_q(func, omega, qmin, qmax, npad, sigma=0)
model = Model(vp=v, origin=origin, shape=shape, spacing=spacing,
space_order=8, bcs=init_damp,nbl=npad,dtype=dtype)
model0 = Model(vp=v, origin=origin, shape=shape, spacing=spacing,
space_order=8, bcs=init_damp,nbl=npad,dtype=dtype)
dt = model.critical_dt
s = model.grid.stepping_dim.spacing
time_range = TimeAxis(start=t0, stop=tn, step=dt)
nt=time_range.num#NBVAL_IGNORE_OUTPUT
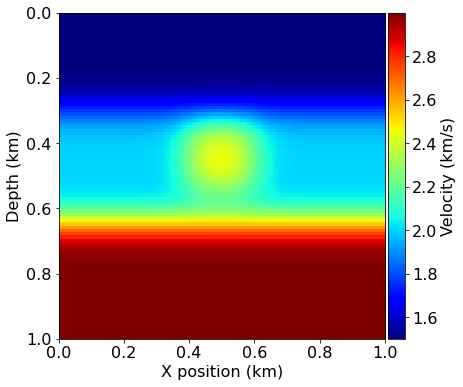
# Create initial model and smooth the boundaries
gaussian_smooth(model0.vp, sigma=filter_sigma)
# Plot the true and initial model
plot_velocity(model)
plot_velocity(model0)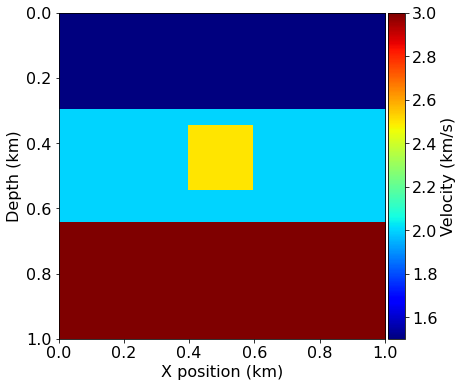
Now we are going to set the source and receiver position.
# First, position source centrally in all dimensions, then set depth
src_coordinates = np.empty((1, 2))
src_coordinates[0, :] = np.array(model.domain_size) * .5
src_coordinates[0, -1] = 30.
# Define acquisition geometry: receivers
# Initialize receivers for synthetic and imaging data
rec_coordinates = np.empty((nreceivers, 2))
rec_coordinates[:, 0] = np.linspace(0, model.domain_size[0], num=nreceivers)
rec_coordinates[:, 1] = 30.
# Geometry
geometry = AcquisitionGeometry(model, rec_coordinates, src_coordinates, t0, tn, f0=fpeak, src_type='Ricker')
solver = AcousticWaveSolver(model, geometry, space_order=8)source_locations = np.empty((nshots, 2), dtype=dtype)
source_locations[:, 0] = np.linspace(0., 1000, num=nshots)
source_locations[:, 1] = 30. # Depth is 30mWe are going to compute the LSRTM gradient.
def lsrtm_gradient(dm):
residual = Receiver(name='residual', grid=model.grid, time_range=geometry.time_axis,
coordinates=geometry.rec_positions)
d_obs = Receiver(name='d_obs', grid=model.grid,time_range=geometry.time_axis,
coordinates=geometry.rec_positions)
d_syn = Receiver(name='d_syn', grid=model.grid,time_range=geometry.time_axis,
coordinates=geometry.rec_positions)
grad_full = Function(name='grad_full', grid=model.grid)
grad_illum = Function(name='grad_illum', grid=model.grid)
src_illum = Function (name ="src_illum", grid = model.grid)
# Using devito's reference of virtual source
dm_true = (solver.model.vp.data**(-2) - model0.vp.data**(-2))
objective = 0.
for i in range(nshots):
#Observed Data using Born's operator
geometry.src_positions[0, :] = source_locations[i, :]
_, u0, _ = solver.forward(vp=model0.vp, save=True)
_, _, _,_ = solver.jacobian(dm_true, vp=model0.vp, rec = d_obs)
#Calculated Data using Born's operator
solver.jacobian(dm, vp=model0.vp, rec = d_syn)
residual.data[:] = d_syn.data[:]- d_obs.data[:]
grad_shot,_ = solver.gradient(rec=residual, u=u0, vp=model0.vp)
src_illum_upd = Eq(src_illum, src_illum + u0**2)
op_src = Operator([src_illum_upd])
op_src.apply()
grad_sum = Eq(grad_full, grad_full + grad_shot)
op_grad = Operator([grad_sum])
op_grad.apply()
objective += .5*norm(residual)**2
grad_f = Eq(grad_illum, grad_full/(src_illum+10**-9))
op_gradf = Operator([grad_f])
op_gradf.apply()
return objective,grad_illum,d_obs,d_synFor the first LSRTM iteration, we used a quite simple step-length using the maximum value of the gradient. For the other LSRTM iterations we used the step-length proposed by Barzilai Borwein. \[\begin{equation} \alpha_{k}^{BB1} = \frac{\mathbf{s}_{k-1}^{T}\mathbf{s}_{k-1}}{\mathbf{s}_{k-1}^{T}\mathbf{y}_{k-1}} \end{equation}\] where \(\textbf{s}_{k-1} = \textbf{m}_{k}-\textbf{m}_{k-1}\) and \(\textbf{y}_{k-1} = \textbf{g}_{k}-\textbf{g}_{k-1}\)
A second option is: \[\begin{equation} \alpha_{k}^{BB2} = \frac{\mathbf{s}_{k-1}^{T}\mathbf{y}_{k-1}}{\mathbf{y}_{k-1}^{T}\mathbf{y}_{k-1}} \end{equation}\]
\[\begin{equation} \alpha_{k} = \begin{cases} \alpha_{k}^{BB2},& \text{if}\ 0 < \frac{\alpha_{k}^{BB2}}{\alpha_{k}^{BB1}} < 1 \\ \alpha_{k}^{BB1},& \text{else} \end{cases} \end{equation}\]
def get_alfa(grad_iter,image_iter,niter_lsrtm):
term1 = np.dot(image_iter.reshape(-1), image_iter.reshape(-1))
term2 = np.dot(image_iter.reshape(-1), grad_iter.reshape(-1))
term3 = np.dot(grad_iter.reshape(-1), grad_iter.reshape(-1))
if niter_lsrtm == 0:
alfa = .05 / mmax(grad_full)
else:
abb1 = term1 / term2
abb2 = term2 / term3
abb3 = abb2 / abb1
if abb3 > 0 and abb3 < 1:
alfa = abb2
else:
alfa = abb1
return alfa Now is the kernel of the LSRTM. The migration will be updated iteratively, using the step-length and the gradient.
#NBVAL_IGNORE_OUTPUT
image_up_dev = np.zeros((model0.vp.shape[0], model0.vp.shape[1]),dtype)
image = np.zeros((model0.vp.shape[0], model0.vp.shape[1]))
nrec=101
niter=20 # number of iterations of the LSRTM
history = np.zeros((niter, 1)) #objective function
image_prev = np.zeros((model0.vp.shape[0],model0.vp.shape[1]))
grad_prev = np.zeros((model0.vp.shape[0],model0.vp.shape[1]))
yk = np.zeros((model0.vp.shape[0],model0.vp.shape[1]))
sk = np.zeros((model0.vp.shape[0],model0.vp.shape[1]))
for k in range(niter) :
dm = image_up_dev # Reflectivity for Calculated data via Born
print('LSRTM Iteration',k+1)
objective,grad_full,d_obs,d_syn = lsrtm_gradient(dm)
history[k] = objective
yk = grad_full.data - grad_prev
sk = image_up_dev - image_prev
alfa = get_alfa(yk,sk,k)
grad_prev = grad_full.data
image_prev = image_up_dev
image_up_dev = image_up_dev - alfa*grad_full.data
if k == 0: # Saving the first migration using Born operator.
image = image_up_devLSRTM Iteration 1
LSRTM Iteration 2
LSRTM Iteration 3
LSRTM Iteration 4
LSRTM Iteration 5
LSRTM Iteration 6
LSRTM Iteration 7
LSRTM Iteration 8
LSRTM Iteration 9
LSRTM Iteration 10
LSRTM Iteration 11
LSRTM Iteration 12
LSRTM Iteration 13
LSRTM Iteration 14
LSRTM Iteration 15
LSRTM Iteration 16
LSRTM Iteration 17
LSRTM Iteration 18
LSRTM Iteration 19
LSRTM Iteration 20#NBVAL_SKIP
plt.figure()
plt.plot(history)
plt.xlabel('Iteration number')
plt.ylabel('Misift value Phi')
plt.title('Convergence')
plt.show()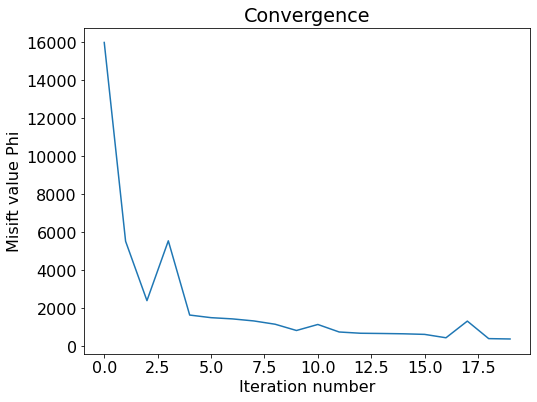
def plot_image(data, vmin=None, vmax=None, colorbar=True, cmap="gray"):
"""
Plot image data, such as RTM images or FWI gradients.
Parameters
----------
data : ndarray
Image data to plot.
cmap : str
Choice of colormap. Defaults to gray scale for images as a
seismic convention.
"""
domain_size = 1.e-3 * np.array(model.domain_size)
extent = [model.origin[0], model.origin[0] + domain_size[0],
model.origin[1] + domain_size[1], model.origin[1]]
plot = plt.imshow(np.transpose(data),
vmin=-.05,
vmax=.05,
cmap=cmap,extent=extent)
plt.xlabel('X position (km)')
plt.ylabel('Depth (km)')
# Create aligned colorbar on the right
if colorbar:
ax = plt.gca()
divider = make_axes_locatable(ax)
cax = divider.append_axes("right", size="5%", pad=0.05)
plt.colorbar(plot, cax=cax)
plt.show()The image below is our first migration. The reflectors are not well focused and backscaterring noise is very strong.
#NBVAL_IGNORE_OUTPUT
slices=tuple(slice(model.nbl,-model.nbl) for _ in range(2))
rtm = image[slices]
plot_image(np.diff(rtm, axis=1))
So here we have the LSRTM migration after 20 iterations, it is clear that the reflector is well focused and backscaterring noise has been strongly attenuated.
#NBVAL_SKIP
slices=tuple(slice(model.nbl,-model.nbl) for _ in range(2))
lsrtm = image_up_dev[slices]
plot_image(np.diff(lsrtm, axis=1))
Here we have the true reflectivity. The idea in showing it is to demonstrate that the amplitude range of the LSRTM is in the same amplitude range of the true reflectivity.
#NBVAL_IGNORE_OUTPUT
slices=tuple(slice(model.nbl,-model.nbl) for _ in range(2))
dm_true = (solver.model.vp.data**(-2) - model0.vp.data**(-2))[slices]
plot_image(np.diff(dm_true, axis=1))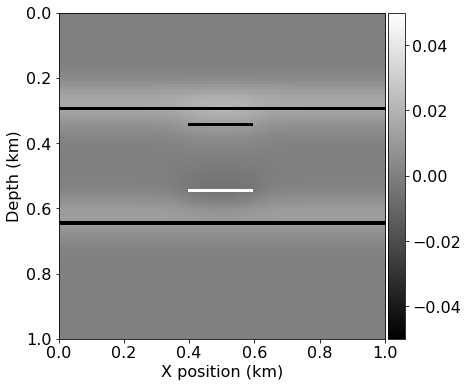
#NBVAL_SKIP
plt.figure(figsize=(8,9))
x = np.linspace(0,1,101)
plt.plot(rtm[50,:],x,color=plt.gray(),linewidth=2)
plt.plot(lsrtm[50,:],x,'r',linewidth=2)
plt.plot(dm_true[50,:],x, 'k--',linewidth=2)
plt.legend(['Initial reflectivity', 'Reflectivity via LSRTM','True Reflectivity'],fontsize=15)
plt.ylabel('Depth (Km)')
plt.xlabel('Amplitude')
plt.gca().invert_yaxis()
plt.show()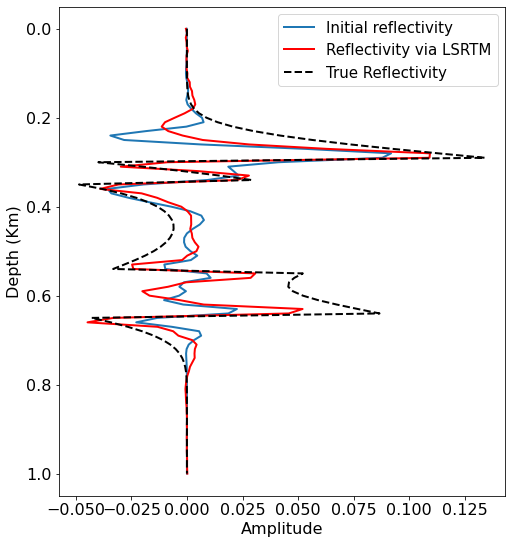
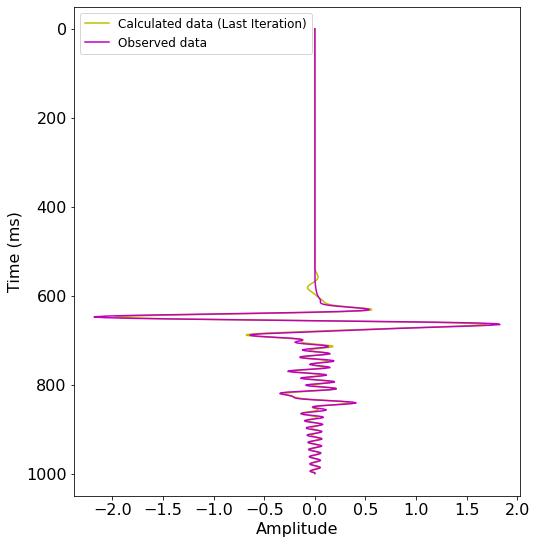
#NBVAL_SKIP
time = np.linspace(t0, tn, nt)
plt.figure(figsize=(8,9))
plt.ylabel('Time (ms)')
plt.xlabel('Amplitude')
plt.plot(d_syn.data[:, 20],time, 'y', label='Calculated data (Last Iteration)')
plt.plot(d_obs.data[:, 20],time, 'm', label='Observed data')
plt.legend(loc="upper left",fontsize=12)
ax = plt.gca()
ax.invert_yaxis()
plt.show()