from devito import *
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.ticker import AutoMinorLocator, FixedLocatorSparse Operations in Devito
Devito provides a robust API for sparse operations, encompassing two crucial functionalities: injection and interpolation. These operations are fundamental for handling sparse data, such as point sources and measurements, within numerical simulations.
The injection operation involves injecting values at specified sparse positions, simulating scenarios like point sources in physical systems. Mathematically, if we denote a SparseTimeFunction as $ S(t, x_s) $, where $ t $ represents time and $ x_s $ denotes sparse spatial coordinates, the injection operation can be expressed as:
\[ u(t, x) = u(t, x) + S(t, x_s) \cdot \delta(x - x_s) \]
Here, $ (x - x_s) $ is the Dirac delta functions, and $ t $ and $ x_s $ represent the time and sparse spatial coordinates of the injection point, respectively.
On the other hand, the interpolation operation reads the values of a field at sparse positions, mimicking point measurements. If $ F(t, x) $ is a field (‘Function’) defined on the full grid, the interpolation operation can be expressed as:
\[ I(t, r) = F(t, x_r) \]
Here, $ I(t, r) $ represents the interpolated values at time $ t $ and sparse spatial coordinates $ x_r $.
In Devito, sparse operations are defined as methods for various sparse function types, including SparseFunction, SparseTimeFunction, PrecomputedSparseFunction, and PrecomputedSparseTimeFunction. For practicality, this tutorial focuses on time-dependent functions, but it’s crucial to note that all operations discussed here apply to spatial-only functions as well.
grid = Grid((51, 51))
nt = 11
f = TimeFunction(name="f", grid=grid, space_order=4)
u = TimeFunction(name="u", grid=grid, space_order=4, save=nt)We first define five sparse positions for the purpose of this tutorial. We consider four points in a 2D grid intentionally not aligned with the grid points to highlight the interpolation and injection operations.
#NBVAL_IGNORE_OUTPUT
npoint = 5
coords = np.random.rand(npoint, 2)/2 + .25
base = np.floor(coords / grid.spacing)*grid.spacing
fig, ax = plt.subplots(figsize=(10, 10))
ax.set_xlim([0, 1])
ax.set_ylim([0, 1])
ax.scatter(coords[:, 0], coords[:, 1], s=10, label="Sparse positions")
ax.grid(which = "major")
ax.grid(which = "minor", alpha = 0.2)
ax.xaxis.set_minor_locator(FixedLocator(np.linspace(0, 1, 51)))
ax.yaxis.set_minor_locator(FixedLocator(np.linspace(0, 1, 51)))
ax.set_title("Off the grid sparse positions")
for i in range(npoint):
ax.annotate("(%.3f, %.3f)" % (coords[i, 0], coords[i, 1]), coords[i, :])
ax.legend()
plt.show()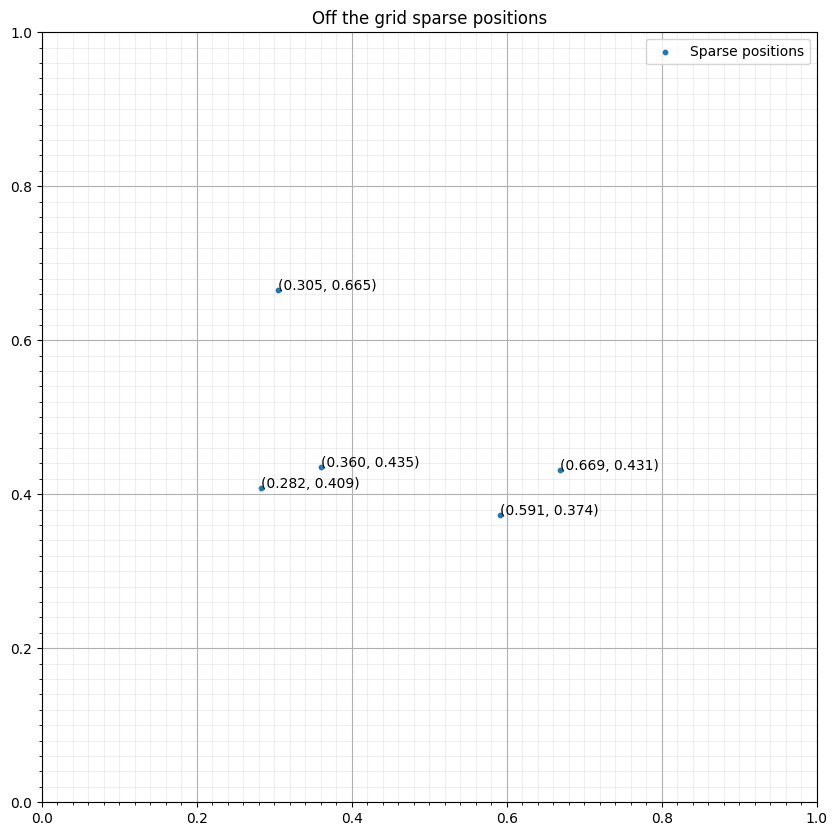
SparseFunction
A SparseFunction is a devito object representing a Function defined at sparse positions. It contains the coordinates of the sparse positions and the data at those positions. The coordinates are stored in a SubFunction object as a Function of shape (npoints, ndim) where npoints is the number of sparse positions and ndim is the number of dimension of the grid.
A SparseFunction comes with the two main methods inject(field, expr) and interpolate(field) that respectively inject expr into field at the sparse positons and interpolate field at the sparse positions.
print(SparseTimeFunction.__doc__)
Tensor symbol representing a space- and time-varying sparse array in symbolic
equations.
Like SparseFunction, SparseTimeFunction carries multi-dimensional data that
are not aligned with the computational grid. As such, each data value is
associated some coordinates.
A SparseTimeFunction provides symbolic interpolation routines to convert
between TimeFunctions and sparse data points. These are based upon standard
[bi,tri]linear interpolation.
Parameters
----------
name : str
Name of the symbol.
npoint : int
Number of sparse points.
nt : int
Number of timesteps along the time Dimension.
grid : Grid
The computational domain from which the sparse points are sampled.
coordinates : np.ndarray, optional
The coordinates of each sparse point.
space_order : int, optional, default=0
Discretisation order for space derivatives.
time_order : int, optional, default=1
Discretisation order for time derivatives.
shape : tuple of ints, optional, default=(nt, npoint)
Shape of the object.
dimensions : tuple of Dimension, optional
Dimensions associated with the object. Only necessary if the SparseFunction
defines a multi-dimensional tensor.
dtype : data-type, optional, default=np.float32
Any object that can be interpreted as a numpy data type.
initializer : callable or any object exposing the buffer interface, default=None
Data initializer. If a callable is provided, data is allocated lazily.
allocator : MemoryAllocator, optional
Controller for memory allocation. To be used, for example, when one wants
to take advantage of the memory hierarchy in a NUMA architecture. Refer to
`default_allocator.__doc__` for more information.
Examples
--------
Creation
>>> from devito import Grid, SparseTimeFunction
>>> grid = Grid(shape=(4, 4))
>>> sf = SparseTimeFunction(name='sf', grid=grid, npoint=2, nt=3)
>>> sf
sf(time, p_sf)
Inspection
>>> sf.data
Data([[0., 0.],
[0., 0.],
[0., 0.]], dtype=float32)
>>> sf.coordinates
sf_coords(p_sf, d)
>>> sf.coordinates_data
array([[0., 0.],
[0., 0.]], dtype=float32)
Symbolic interpolation routines
>>> from devito import TimeFunction
>>> f = TimeFunction(name='f', grid=grid)
>>> exprs0 = sf.interpolate(f)
>>> exprs1 = sf.inject(f, sf)
Notes
-----
The parameters must always be given as keyword arguments, since SymPy
uses ``*args`` to (re-)create the Dimension arguments of the symbolic object.
Multilinear interpolation
from itertools import products = SparseTimeFunction(name="s", grid=grid, npoint=npoint, nt=nt, coordinates=coords)
d1, d2 = grid.spacing
interp_points = np.concatenate([base+(s1*d1, s2*d2) for (s1, s2) in s._point_support])#NBVAL_IGNORE_OUTPUT
fig, ax = plt.subplots(figsize=(10, 10))
ax.set_xlim([0, 1])
ax.set_ylim([0, 1])
ax.scatter(coords[:, 0], coords[:, 1], s=10, label="Sparse positions")
ax.scatter(interp_points[:, 0], interp_points[:, 1], s=10, label="Interpolation support")
ax.grid(which = "major")
ax.grid(which = "minor", alpha = 0.2)
ax.xaxis.set_minor_locator(FixedLocator(np.linspace(0, 1, 51)))
ax.yaxis.set_minor_locator(FixedLocator(np.linspace(0, 1, 51)))
ax.set_title("Off the grid sparse positions")
for i in range(npoint):
ax.annotate("(%.3f, %.3f)" % (coords[i, 0], coords[i, 1]), coords[i, :])
ax.legend()
plt.show()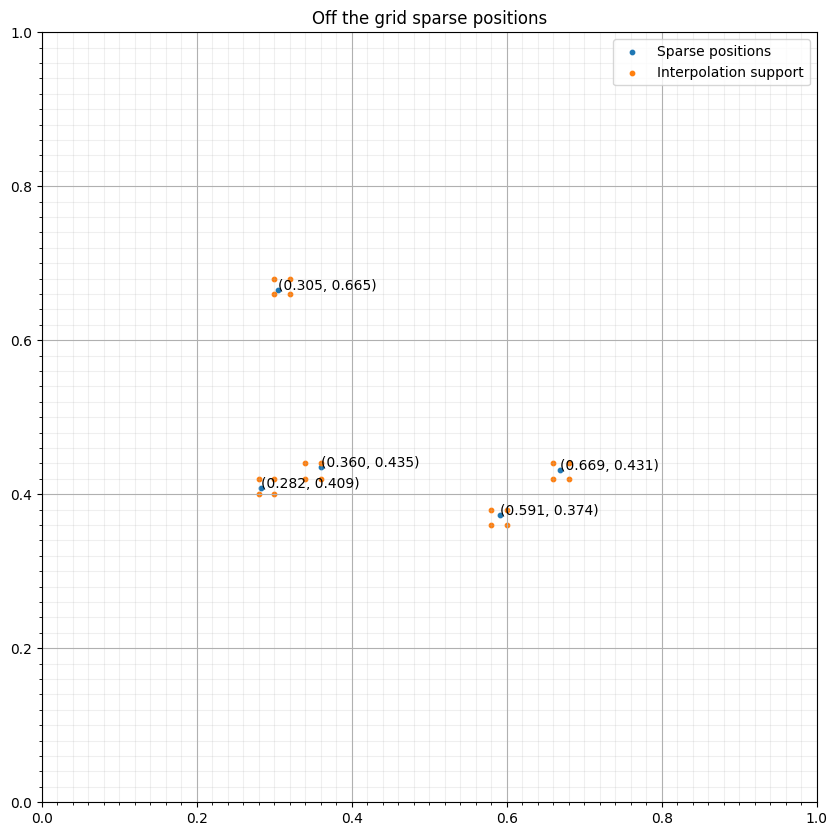
We first look at the interpolation section and how it is internally lowered into a linear interpolation method.
print("\n".join([str(s) for s in s.interpolate(f).evaluate]))Eq(posx, (int)(floor((-o_x + s_coords(p_s, 0))/h_x)))
Eq(posy, (int)(floor((-o_y + s_coords(p_s, 1))/h_y)))
Eq(px, -floor((-o_x + s_coords(p_s, 0))/h_x) + (-o_x + s_coords(p_s, 0))/h_x)
Eq(py, -floor((-o_y + s_coords(p_s, 1))/h_y) + (-o_y + s_coords(p_s, 1))/h_y)
Eq(sum, 0.0)
Inc(sum, (rsx*px + (1 - rsx)*(1 - px))*(rsy*py + (1 - rsy)*(1 - py))*f(t, rsx + posx, rsy + posy))
Eq(s(time, p_s), sum)f.data.fill(0)
op = Operator([Eq(f.forward, f+1)] + s.interpolate(f))#NBVAL_IGNORE_OUTPUT
op()
s.dataOperator `Kernel` ran in 0.01 sData([[0., 0., 0., 0., 0.],
[1., 1., 1., 1., 1.],
[2., 2., 2., 2., 2.],
[3., 3., 3., 3., 3.],
[4., 4., 4., 4., 4.],
[5., 5., 5., 5., 5.],
[6., 6., 6., 6., 6.],
[7., 7., 7., 7., 7.],
[8., 8., 8., 8., 8.],
[9., 9., 9., 9., 9.],
[0., 0., 0., 0., 0.]], dtype=float32)#NBVAL_IGNORE_OUTPUT
op = Operator(s.inject(u, expr=s))
op()Operator `Kernel` ran in 0.01 sPerformanceSummary([(PerfKey(name='section0', rank=None),
PerfEntry(time=4.6e-05, gflopss=0.0, gpointss=0.0, oi=0.0, ops=0, itershapes=[]))])#NBVAL_IGNORE_OUTPUT
plt.figure(figsize=(10, 10))
plt.imshow(u.data[1], vmin=0, vmax=1, cmap="jet", extent=[0,1,0,1])
plt.colorbar(fraction=0.046, pad=0.04)
plt.title("Linear weights")
plt.show()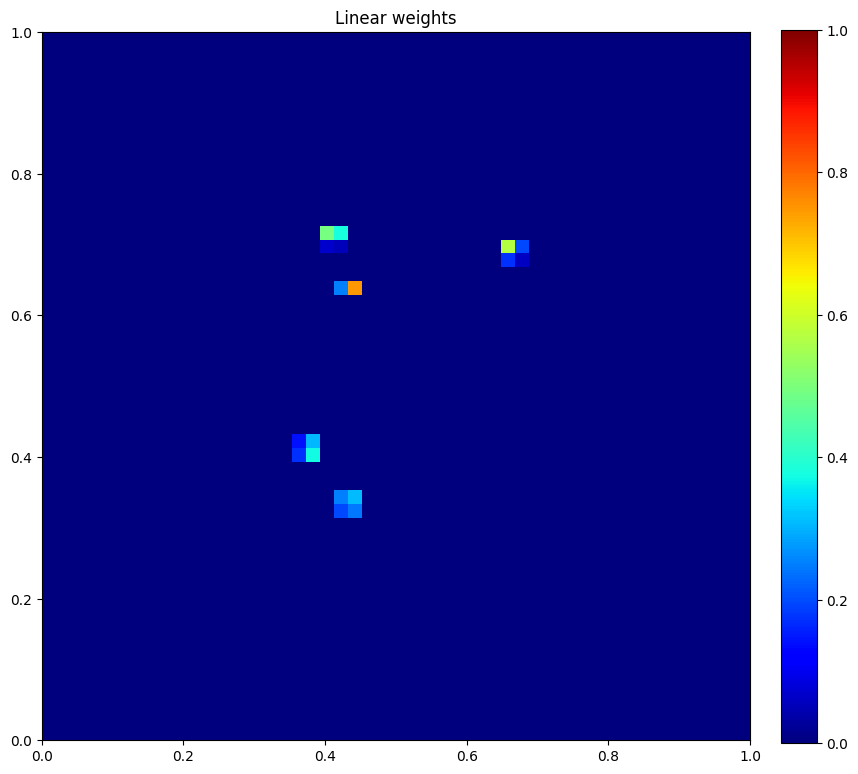
Kaiser sinc interpolation
Graham J. Hicks pioneered an approach to address one of the significant challenges in seismic simulation: the accurate and flexible positioning of sources and receivers in finite-difference computational grids. By integrating Kaiser windowed sinc functions into the interpolation process, Hicks’ method facilitates arbitrary placement of these elements, overcoming the limitations imposed by the inherent discreteness of computational grids. This technique is especially beneficial in seismic wave propagation models, where precise source and receiver locations are crucial for accurate subsurface imaging.
Mathematical Basis of the Interpolation
The interpolation of a field value, \(f\), at an arbitrary point using the Kaiser windowed sinc function can be mathematically expressed as follows:
\[ f(x) = \sum_{n=-r}^{r} f_n \cdot \text{sinc}\left( \frac{x - x_n}{\Delta x} \right) \cdot w\left( \frac{x - x_n}{\alpha} \right) \]
where: - \(f_n\) represents the field values at grid points. - \(x\) denotes the arbitrary (non-grid-aligned) position where the field value is interpolated. - \(x_n\) refers to the position of the \(n\)-th grid point. - \(\Delta x\) is the grid spacing. - \(w(\cdot)\) is the Kaiser window function applied to modulate the sinc function, defined as: \[ w(x) = \frac{I_0\left( \beta \sqrt{1 - \left( \frac{x}{\alpha} \right)^2} \right)}{I_0(\beta)} \] - \(I_0\) is the modified Bessel function of the first kind and zero order. - \(\beta\) is the Kaiser window’s shape parameter, controlling sidelobe attenuation. - \(\alpha\) is a scaling factor that adjusts the effective width of the window, enhancing the function’s ability to interpolate over a wider area without significant loss of accuracy.
Practical Implications for Seismic Modeling
This interpolation formula is pivotal for improving the fidelity of finite-difference simulations in seismic applications. By allowing for the precise positioning of sources and receivers, it enables more accurate modeling of wave propagation through complex geological structures. The flexibility offered by this method significantly enhances the quality of seismic images, providing clearer insights into the Earth’s subsurface.
s = SparseTimeFunction(name="s", grid=grid, npoint=npoint, nt=nt, coordinates=coords, interpolation='sinc')
interp_points = np.concatenate([base+(s1*d1, s2*d2) for (s1, s2) in s._point_support])#NBVAL_IGNORE_OUTPUT
fig, ax = plt.subplots(figsize=(10, 10))
ax.set_xlim([0, 1])
ax.set_ylim([0, 1])
ax.scatter(coords[:, 0], coords[:, 1], s=10, label="Sparse positions")
ax.scatter(interp_points[:, 0], interp_points[:, 1], s=10, label="Interpolation support")
ax.grid(which = "major")
ax.grid(which = "minor", alpha = 0.2)
ax.xaxis.set_minor_locator(FixedLocator(np.linspace(0, 1, 51)))
ax.yaxis.set_minor_locator(FixedLocator(np.linspace(0, 1, 51)))
ax.set_title("Off the grid sparse positions")
for i in range(npoint):
ax.annotate("(%.3f, %.3f)" % (coords[i, 0], coords[i, 1]), coords[i, :])
ax.legend()
plt.show()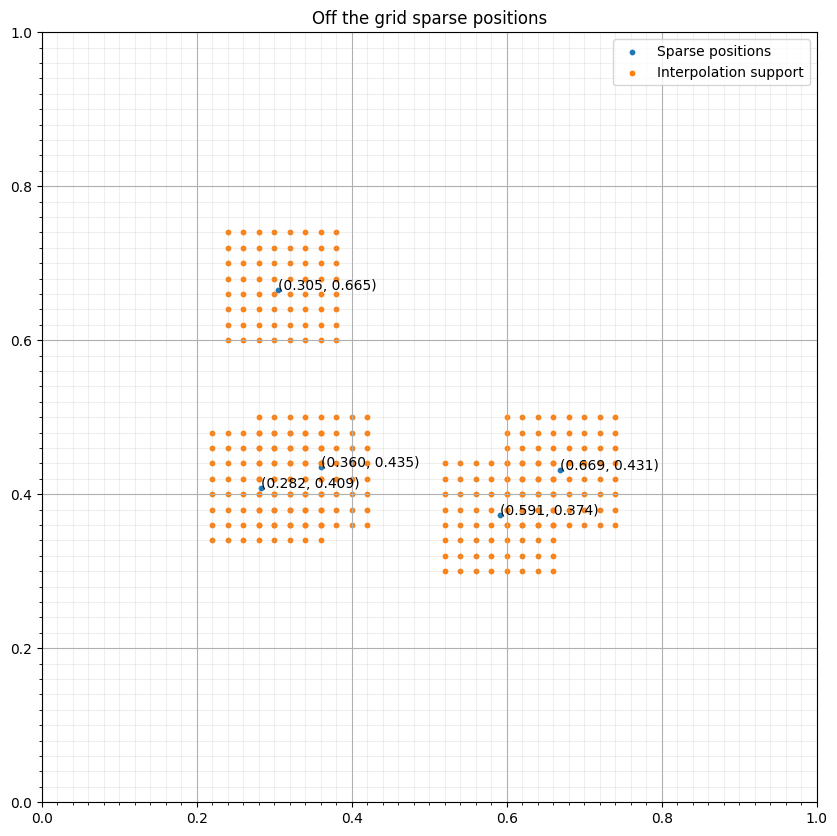
print("\n".join([str(s) for s in s.interpolate(f).evaluate]))Eq(posx, (int)(floor((-o_x + s_coords(p_s, 0))/h_x)))
Eq(posy, (int)(floor((-o_y + s_coords(p_s, 1))/h_y)))
Eq(sum, 0.0)
Inc(sum, wsincrsx(p_s, rsx + 3)*wsincrsy(p_s, rsy + 3)*f(t, rsx + posx, rsy + posy))
Eq(s(time, p_s), sum)f.data.fill(0)
op = Operator([Eq(f.forward, f+1)] + s.interpolate(f))#NBVAL_IGNORE_OUTPUT
op()
s.dataOperator `Kernel` ran in 0.01 sData([[0. , 0. , 0. , 0. , 0. ],
[0.9967038 , 0.9920868 , 0.99406236, 0.9936394 , 0.99242455],
[1.9934076 , 1.9841737 , 1.9881247 , 1.9872788 , 1.9848491 ],
[2.9901118 , 2.9762604 , 2.9821863 , 2.9809184 , 2.9772737 ],
[3.9868152 , 3.9683473 , 3.9762495 , 3.9745576 , 3.9696982 ],
[4.9835196 , 4.9604344 , 4.9703097 , 4.968197 , 4.962124 ],
[5.9802237 , 5.952521 , 5.9643726 , 5.961837 , 5.9545474 ],
[6.976928 , 6.9446087 , 6.958436 , 6.9554768 , 6.9469705 ],
[7.9736304 , 7.9366946 , 7.952499 , 7.9491153 , 7.9393964 ],
[8.970336 , 8.9287815 , 8.946562 , 8.942754 , 8.931824 ],
[0. , 0. , 0. , 0. , 0. ]],
dtype=float32)#NBVAL_IGNORE_OUTPUT
op = Operator(s.inject(u, expr=s))
op()Operator `Kernel` ran in 0.01 sPerformanceSummary([(PerfKey(name='section0', rank=None),
PerfEntry(time=3.9999999999999996e-05, gflopss=0.0, gpointss=0.0, oi=0.0, ops=0, itershapes=[]))])#NBVAL_IGNORE_OUTPUT
plt.figure(figsize=(10, 10))
plt.imshow(u.data[1], vmin=0, vmax=1, cmap="jet", extent=[0,1,0,1])
plt.colorbar(fraction=0.046, pad=0.04)
plt.title("Sinc weights")
plt.show()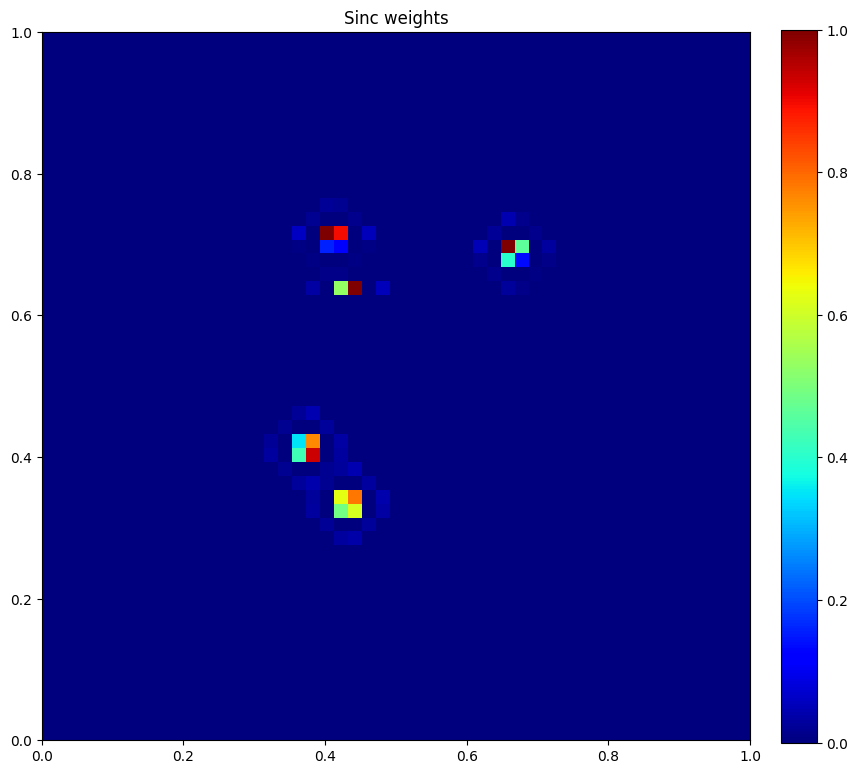
PrecomputedSparseFunction
In some cases, simple linear interpolation may not be sufficient for two main reasons: - The polynomial approximation isn’t accurate enough - The interpolation coefficients could be precomputed as they are not time-dependent
PrecomputedSparseFunction offer the interface to answer these two points by allowing the user to provide arbitrary precomputed interpolation weights over an arbitrary large support.
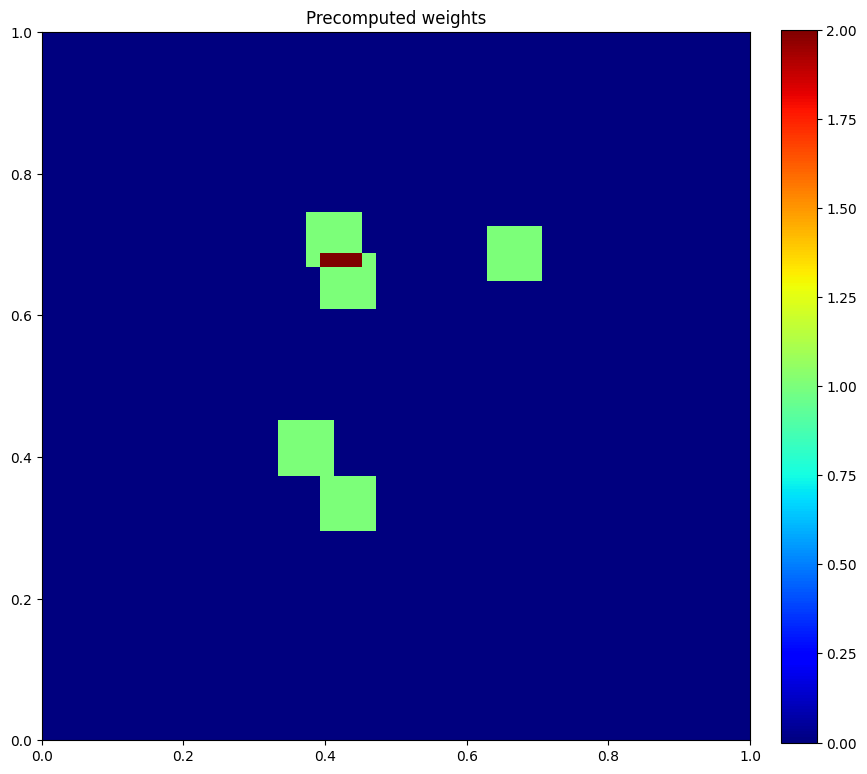
To illustrate this capability, we show in the following how to use PrecomputedSparseFunction to compute a simple local average over a 4x4 window centered on a sparse point ( average over [x-1, x, x+1, x+2] in 1D)
print(PrecomputedSparseFunction.__doc__)
Tensor symbol representing a sparse array in symbolic equations; unlike
SparseFunction, PrecomputedSparseFunction uses externally-defined data
for interpolation.
Parameters
----------
name : str
Name of the symbol.
npoint : int
Number of sparse points.
grid : Grid
The computational domain from which the sparse points are sampled.
r : int
Number of gridpoints in each Dimension to interpolate a single sparse
point to. E.g. `r=2` for linear interpolation.
coordinates : np.ndarray, optional
The coordinates of each sparse point.
gridpoints : np.ndarray, optional
An array carrying the *reference* grid point corresponding to each
sparse point. Of all the gridpoints that one sparse point would be
interpolated to, this is the grid point closest to the origin, i.e. the
one with the lowest value of each coordinate Dimension. Must be a
two-dimensional array of shape `(npoint, grid.ndim)`.
interpolation_coeffs : np.ndarray, optional
An array containing the coefficient for each of the r^2 (2D) or r^3
(3D) gridpoints that each sparse point will be interpolated to. The
coefficient is split across the n Dimensions such that the contribution
of the point (i, j, k) will be multiplied by
`interp_coeffs[..., i]*interp_coeffs[...,j]*interp_coeffs[...,k]`.
So for `r=6`, we will store 18 coefficients per sparse point (instead of
potentially 216). Must be a three-dimensional array of shape
`(npoint, grid.ndim, r)`.
space_order : int, optional, default=0
Discretisation order for space derivatives.
shape : tuple of ints, optional, default=(npoint,)
Shape of the object.
dimensions : tuple of Dimension, optional
Dimensions associated with the object. Only necessary if the SparseFunction
defines a multi-dimensional tensor.
dtype : data-type, optional, default=np.float32
Any object that can be interpreted as a numpy data type.
initializer : callable or any object exposing the buffer interface, optional
Data initializer. If a callable is provided, data is allocated lazily.
allocator : MemoryAllocator, optional
Controller for memory allocation. To be used, for example, when one wants
to take advantage of the memory hierarchy in a NUMA architecture. Refer to
`default_allocator.__doc__` for more information.
Notes
-----
The parameters must always be given as keyword arguments, since SymPy
uses `*args` to (re-)create the Dimension arguments of the symbolic object.
coeffs = np.ones((5, 2, 5))
s = PrecomputedSparseTimeFunction(name="s", grid=grid, npoint=npoint, nt=nt,
interpolation_coeffs=coeffs,
coordinates=coords, r=2)
pos = tuple(product((-grid.spacing[1], 0, grid.spacing[1],2*grid.spacing[1]),
(-grid.spacing[1], 0, grid.spacing[1],2*grid.spacing[1])))
interp_points = np.concatenate([base+p for p in pos])#NBVAL_IGNORE_OUTPUT
fig, ax = plt.subplots(figsize=(10, 10))
ax.set_xlim([0, 1])
ax.set_ylim([0, 1])
ax.scatter(coords[:, 0], coords[:, 1], s=10, label="Sparse positions")
ax.scatter(interp_points[:, 0], interp_points[:, 1], s=10, label="Interpolation support")
ax.grid(which = "major")
ax.grid(which = "minor", alpha = 0.2)
ax.xaxis.set_minor_locator(FixedLocator(np.linspace(0, 1, 51)))
ax.yaxis.set_minor_locator(FixedLocator(np.linspace(0, 1, 51)))
ax.set_title("Off the grid sparse positions")
for i in range(npoint):
ax.annotate("(%.3f, %.3f)" % (coords[i, 0], coords[i, 1]), coords[i, :])
ax.legend()
plt.show()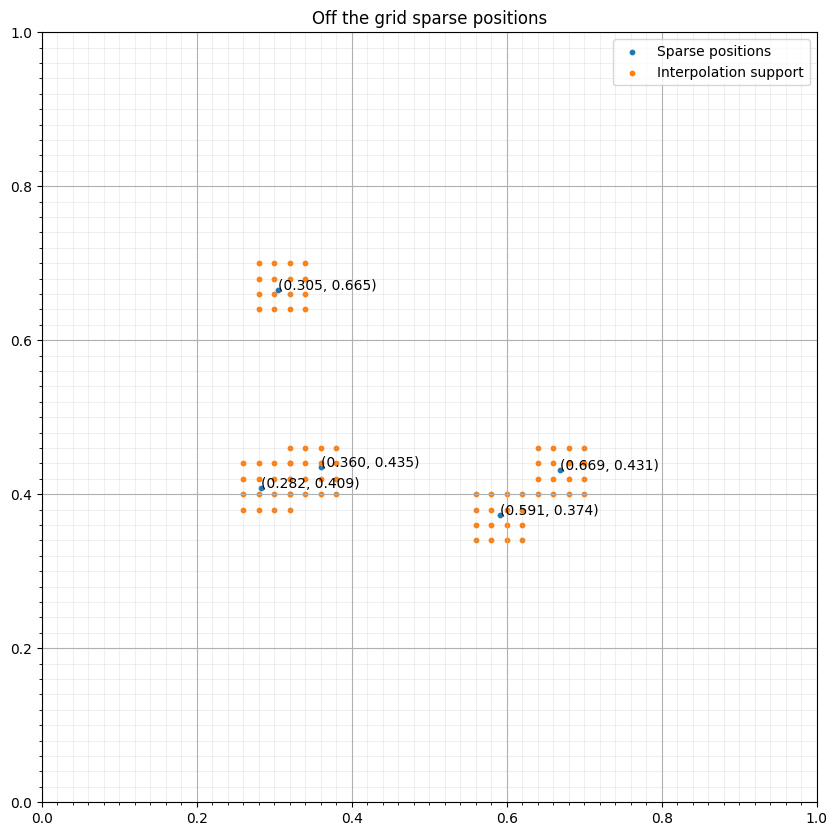
f.data.fill(0)
op = Operator([Eq(f.forward, f+1)] + s.interpolate(f/16))#NBVAL_IGNORE_OUTPUT
op()
s.dataOperator `Kernel` ran in 0.01 sData([[0., 0., 0., 0., 0.],
[1., 1., 1., 1., 1.],
[2., 2., 2., 2., 2.],
[3., 3., 3., 3., 3.],
[4., 4., 4., 4., 4.],
[5., 5., 5., 5., 5.],
[6., 6., 6., 6., 6.],
[7., 7., 7., 7., 7.],
[8., 8., 8., 8., 8.],
[9., 9., 9., 9., 9.],
[0., 0., 0., 0., 0.]], dtype=float32)#NBVAL_IGNORE_OUTPUT
u.data.fill(0)
op = Operator(s.inject(u, expr=s))
op()Operator `Kernel` ran in 0.01 sPerformanceSummary([(PerfKey(name='section0', rank=None),
PerfEntry(time=4.1e-05, gflopss=0.0, gpointss=0.0, oi=0.0, ops=0, itershapes=[]))])#NBVAL_IGNORE_OUTPUT
plt.figure(figsize=(10, 10))
plt.imshow(u.data[1], vmin=0, vmax=2, cmap="jet", extent=[0,1,0,1])
plt.colorbar(fraction=0.046, pad=0.04)
plt.title("Precomputed weights")
plt.show()